PID控制算法及Python实现
1、PID算法简介
在控制领域,PID算法是应用最广泛的算法之一。
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。
常用于需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等)。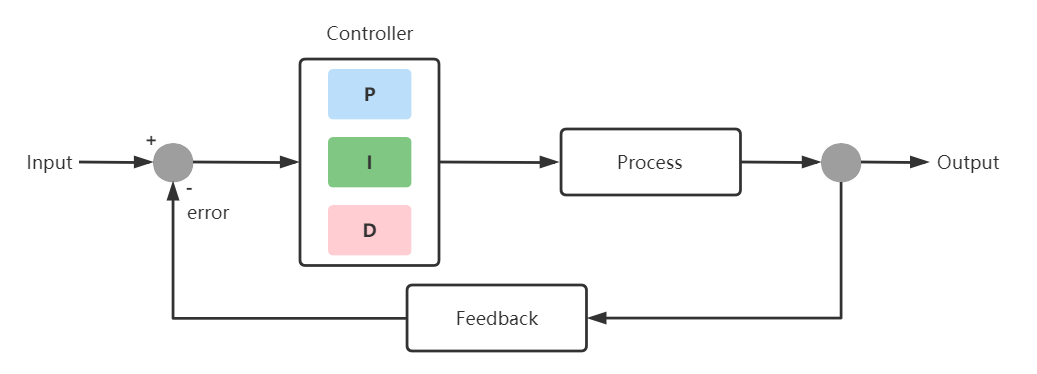
PID算法的公式为:
对其进行离散化:
(1)P - 比例部分
比例环节的作用是对偏差瞬间作出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减少偏差的方向变化。
控制作用的强弱取决于比例系数Kp,比例系数Kp越大,控制作用越强,则过渡过程越快,控制过程的静态偏差也就越小;
但是Kp越大,也越容易产生振荡, 破坏系统的稳定性。
故而,比例系数Kp选择必须恰当,才能过渡时间少,静差小而又稳定的效果。
(2)I - 积分部分
从积分部分的数学表达式可以知道,只要存在偏差,则它的控制作用就不断的增加;
只有在偏差e(t)=0时, 它的积分才能是一个常数,控制作用才是一个不会增加的常数。
可见,积分部分可以消除系统的偏差。
(3)D - 微分部分
实际的控制系统除了希望消除静态误差外,还要求加快调节过程。
在偏差出现的瞬间,或在偏差变化的瞬间,不但要对偏差量做出立即响应(比例环节的作用),而且要根据偏差的变化趋势预先给出适当的纠正。为了实现这一作用,可在 PI 控制器的基础上加入微分环节,形成 PID 控制器。
我们需要一个控制作用,让被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用。
2、PID算法原理
PID算法的原理详见下面UP主的视频:
3、Python实现
(1)位置式PID
位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值。
位置式PID控制的累积误差相对更大。
位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
位置式的输出直接对应对象的输出,因此对系统影响较大。
公式推导:
(2)增量式PID
增量式PID的输出只与当前拍和前两拍的误差有关。
增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等。
由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作
公式推导:
(3)代码实现
import time
import matplotlib.pyplot as plt
# from simple_pid import PID
# 解决中文显示问题
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
class MyPID:
def __init__(self, Kp=1.2, Ki=1., Kd=0.002):
self.Kp = Kp # 比例系数Proportional
self.Ki = Ki # 积分系数Integral
self.Kd = Kd # 微分系数Derivative
self.Ek = 0 # 当前误差 e(k)
self.Ek1 = 0 # 前一次误差 e(k - 1)
self.Ek2 = 0 # 再前一次误差 e(k - 2)
self.LocSum = 0 # 累计积分位置
def PIDLoc(self, SetValue, ActualValue):
'''
PID位置(Location)计算
:param SetValue:设置值(期望值)
:param ActualValue:实际值(反馈值)
:return:PID位置
'''
self.Ek = SetValue - ActualValue
self.LocSum += self.Ek # 累计误差
PIDLoc = self.Kp * self.Ek + (self.Ki * self.LocSum) + self.Kd * (self.Ek1 - self.Ek)
self.Ek2 = self.Ek1
self.Ek1 = self.Ek
return PIDLoc
def PIDInc(self, SetValue, ActualValue):
'''
PID增量(Increment)计算
:param SetValue: 设置值(期望值)
:param ActualValue:实际值(反馈值)
:return: 本次PID增量(+/-)
'''
self.Ek = SetValue - ActualValue
PIDInc = (self.Kp * self.Ek) - (self.Ki * self.Ek1) + (self.Kd * self.Ek2)
self.Ek2 = self.Ek1
self.Ek1 = self.Ek
return PIDInc
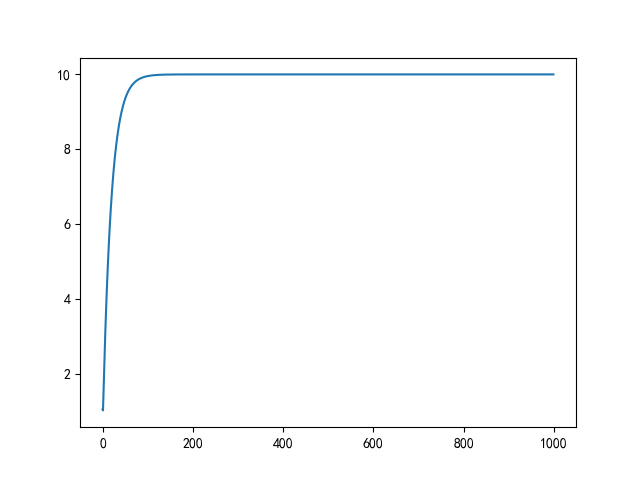
# 位置式
myPID = MyPID(Kp=0.9, Ki=0.15, Kd=0.7)
SetValue = 10
ActualValue = 1
ActualValue_list = []
for i in range(1000):
PIDLoc = myPID.PIDLoc(SetValue, ActualValue)
ActualValue = PIDLoc
print(ActualValue)
ActualValue_list.append(ActualValue)
plt.plot(ActualValue_list)
plt.show()
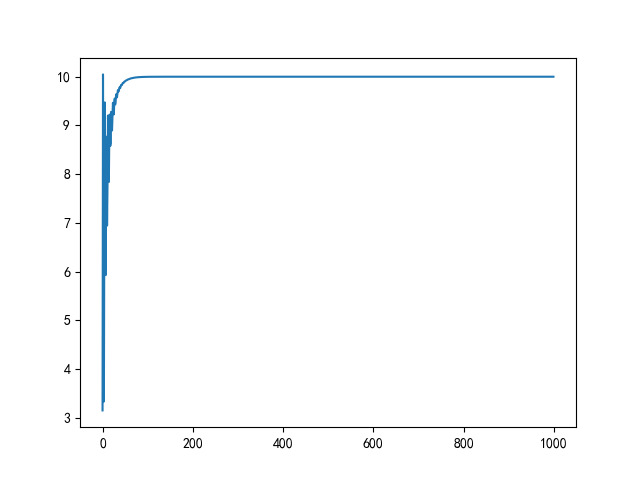
# 增量式
myPID = MyPID(Kp=0.005, Ki=0.008, Kd=0.05)
SetValue = 10
ActualValue = 1
ActualValue_list = []
for i in range(1000):
PIDInc = myPID.PIDInc(SetValue, ActualValue)
ActualValue += PIDInc
print(ActualValue)
ActualValue_list.append(ActualValue)
plt.plot(ActualValue_list)
plt.show()